
An unmanned surface vehicle (USV), designed by a group of Hungarian engineers, is the winner of the IAEA Robotics Challenge, launched in 2017. The design was selected by the IAEA, having first undergone a thorough evaluation of design and performance by its experts.
The Robotics Challenge sought to find innovative ways to enhance in-field inspection activities. Such activities form the core of the IAEA’s nuclear verification work, known as ‘safeguards’. Some of the most common tasks undertaken by IAEA nuclear safeguards inspectors involve making repetitive measurements in locations that can be difficult to access and/or have elevated radiation levels. This is an area where robotics has the potential to play a useful role.
When performing their inspection activities at nuclear facilities around the world, nuclear safeguards inspectors frequently use a small hand-held optical instrument called the Improved Cerenkov Viewing Device (ICVD). The ICVD confirms the presence of spent nuclear fuel stored underwater, where it is typically placed for cooling following its removal from the reactor core. The job of inspectors is to verify whether the amount of fuel stored matches the amount declared by national authorities, and that none of it has been removed and potentially diverted from peaceful use.
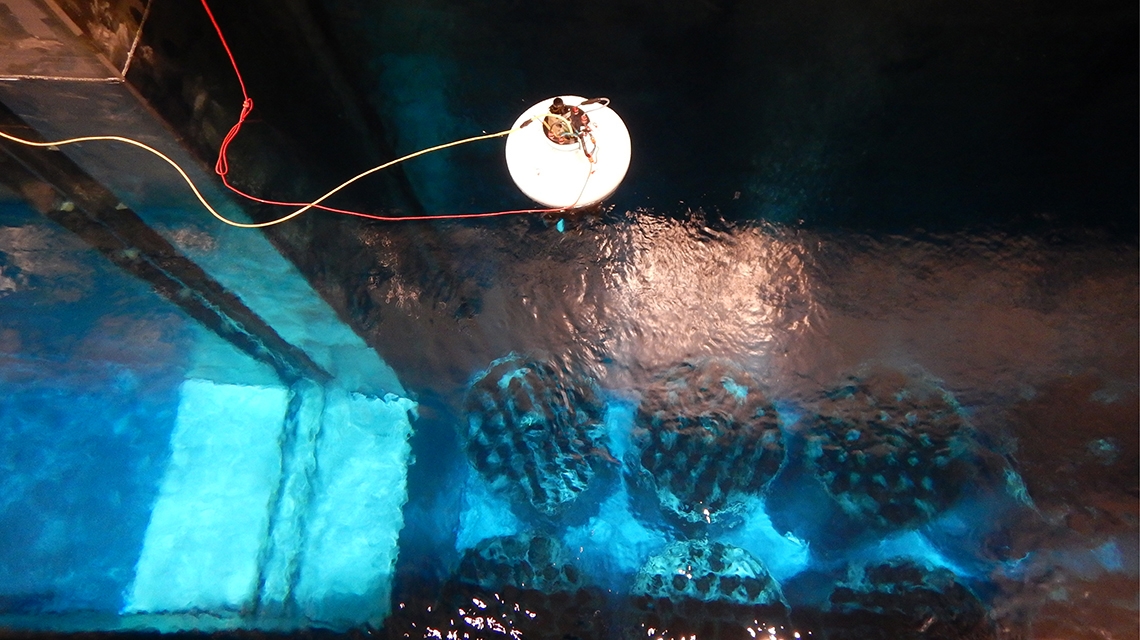
Currently, safeguards inspectors need to hold the ICVD from a gantry suspended above a spent fuel pool and manually peer through a lens at the individual fuel assemblies, of which there can be hundreds at a time. For the Challenge, the IAEA sought designs that could mount the newly developed neXt Generation Cerenkov Viewing Device (XCVD), capable of providing digital recording, inside a small robotised floating platform which would autonomously propel itself across the surface of a spent fuel pool. By stabilising the XCVD in a vertical position, the USV could enable the provision of clearer images in a shorter timeframe to aid nuclear safeguards inspectors in verifying the spent nuclear fuel.
To be able to contribute to nuclear non-proliferation efforts and the important verification work of the IAEA is very exciting.


