
Aunque el combustible nuclear gastado ya no puede mantener reacciones nucleares en cadena que sean capaces de generar electricidad, sigue conteniendo materiales nucleares que se pueden utilizar para fabricar armas. Por esta razón, la verificación del combustible gastado es un componente fundamental de la labor del OIEA en materia de salvaguardias nucleares.
Por lo general, el combustible gastado se almacena sumergiéndolo en agua para enfriarlo. En esas condiciones, verificar el combustible nuclear gastado puede ser un proceso complicado y largo. Para hacerlo, los inspectores del OIEA han de situarse encima de las piscinas de combustible nuclear gastado para sacar fotografías de los distintos conjuntos de combustible gastado, de los que puede haber cientos a la vez. Este proceso se ha señalado como un ámbito en el que la robótica puede ser útil; por ello, en 2017, el OIEA puso en marcha un concurso de ideas y soluciones para aumentar la eficacia y la eficiencia de la verificación del combustible gastado.
Al realizar sus actividades de inspección en las instalaciones nucleares de todo el mundo, los inspectores de salvaguardias utilizan con frecuencia un pequeño instrumento óptico de mano denominado dispositivo mejorado de observación de la radiación de Cherenkov (ICVD) para confirmar la presencia de combustible nuclear gastado almacenado bajo el agua, que es donde se suele sumergir para enfriarlo una vez retirado del núcleo del reactor. Los inspectores han de verificar que la cantidad de combustible almacenado coincida con la declarada por las autoridades nacionales y que no se haya retirado nada de combustible para su posible desvío de los usos pacíficos.
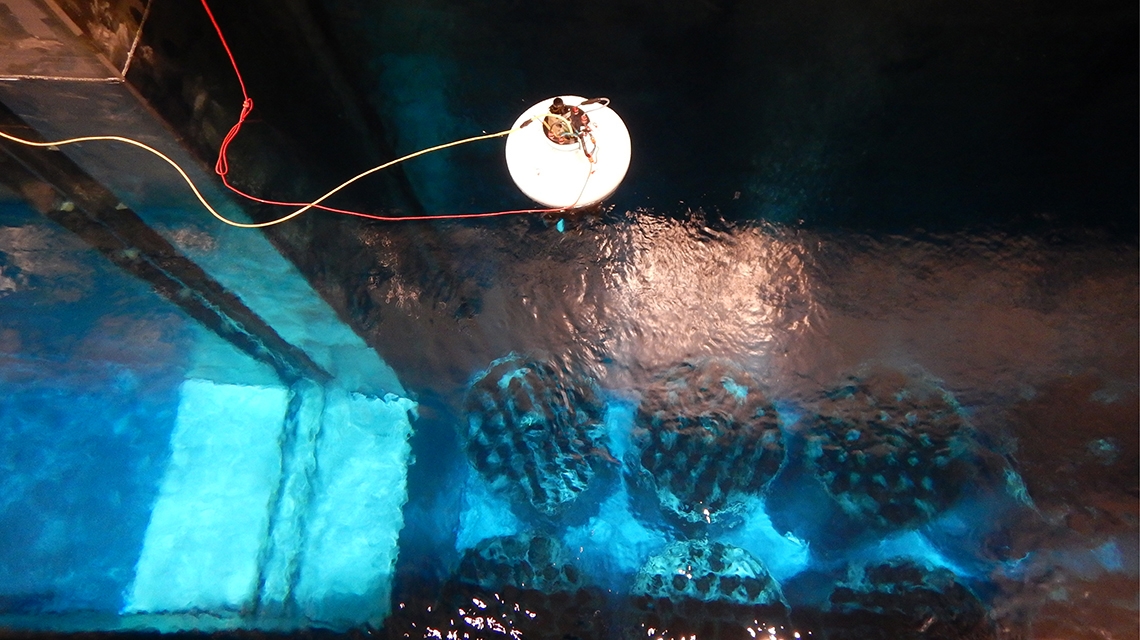
Actualmente, los inspectores de salvaguardias tienen que sostener el ICDV desde una grúa suspendida sobre la piscina de combustible gastado y, de forma manual, observar los distintos conjuntos de combustible a través de una lente. Con el Concurso de tecnología robótica, el OIEA buscaba diseños que permitieran acoplar el dispositivo de observación de la radiación Cherenkov de la próxima generación (XCVD), de reciente creación y capaz de grabar en formato digital, dentro de una pequeña plataforma flotante robotizada que se propulsara de forma autónoma por la superficie de la piscina de combustible gastado. Al estabilizar el XCVD en posición vertical, el vehículo de superficie no tripulado (USV) podría facilitar la obtención de imágenes más claras en menos tiempo.
Es apasionante contribuir a los esfuerzos de no proliferación nuclear y a la importante labor de verificación del OIEA.


