Si les réactions atomiques en chaîne permettant de produire de l’électricité ne sont plus entretenues dans le combustible usé, celui-ci contient encore des matières nucléaires qui pourraient être utilisées dans des armes. C’est pourquoi la vérification du combustible usé est une composante centrale des travaux menés au titre des garanties nucléaires de l’AIEA.
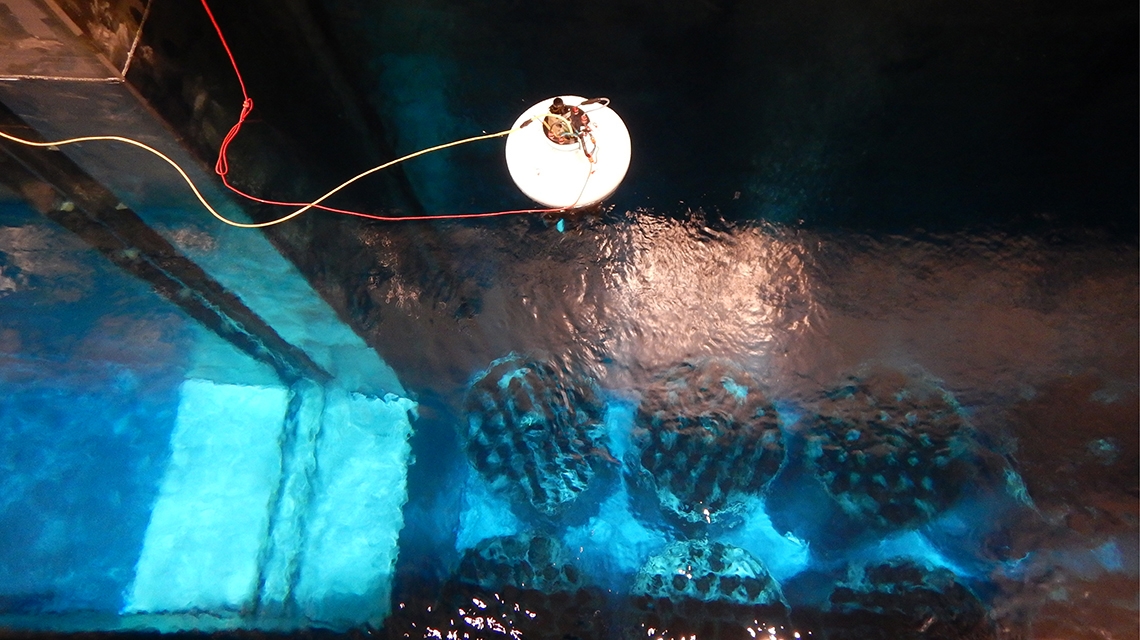
Afin qu’il refroidisse, le combustible usé est habituellement entreposé sous l’eau. Cela rend parfois sa vérification longue et difficile. Les inspecteurs de l’AIEA doivent aller au-dessus des piscines d’entreposage pour photographier les différents assemblages de combustible usé, qui se comptent parfois par centaines. Percevant le fort potentiel d’une application de la robotique dans la réalisation de ce processus, l’AIEA a lancé en 2017 un défi de production participative pour trouver des idées et des solutions visant à améliorer l’efficacité et l’efficience de la vérification du combustible usé.
Lors des activités d’inspection qu’ils mènent dans des installations nucléaires du monde entier, les inspecteurs des garanties utilisent souvent un petit instrument optique portable, appelé « dispositif amélioré d’observation de l’effet Tcherenkov » (ICVD). Ce dispositif permet de confirmer la présence de combustible nucléaire usé dans la piscine, où ce dernier est généralement placé en vue de son refroidissement après avoir été retiré du cœur du réacteur. Les inspecteurs sont chargés de vérifier que la quantité de combustible entreposé est bien celle qui a été déclarée par les autorités nationales, et qu’aucune part de celui-ci n’a été retirée et potentiellement détournée de ses utilisations pacifiques.
Actuellement, les inspecteurs des garanties doivent manœuvrer l’ICVD à partir d’un support mobile suspendu au-dessus d’une piscine d’entreposage et regarder chaque assemblage combustible à travers une lentille. Dans le cadre du « Robotics Challenge », l’AIEA recherchait des modèles pouvant être couplés aux dispositifs d’observation de l’effet Tcherenkov de la prochaine génération (XCVD), récemment conçus et permettant d’obtenir des images numériques, dans une petite plateforme flottante robotisée qui se propulserait de façon autonome à la surface de la piscine d’entreposage du combustible usé. Si le XCVD est immobilisé en position verticale, le véhicule de surface sans pilote (USV) permet de produire des images plus claires en un temps plus court.
C’est vraiment enthousiasmant d’apporter notre pierre à l’édifice de la non-prolifération nucléaire et de contribuer au travail important de vérification mené par l’AIEA.


